1. 技術(shù)概述:什么是帶慣導(dǎo)MEMS差分接收機(jī)?
帶慣導(dǎo)MEMS差分接收機(jī)是一種集成了微機(jī)電系統(tǒng)(MEMS)慣性測量單元(IMU)與差分全球?qū)Ш叫l(wèi)星系統(tǒng)(DGNSS,如RTK)的高精度融合定位終端。它通過結(jié)合兩種互補(bǔ)技術(shù),克服了單一技術(shù)的局限性:DGNSS提供絕對位置但可能受信號遮擋影響,而MEMS慣導(dǎo)(通常包含加速度計和陀螺儀)可在短時間內(nèi)提供連續(xù)、高頻的相對位移與姿態(tài),但存在誤差累積。二者的深度融合,實(shí)現(xiàn)了在復(fù)雜環(huán)境(如城市峽谷、隧道、林區(qū))下穩(wěn)定、連續(xù)、高精度的定位、測速與定姿。
2. 核心技術(shù)與工作原理
2.1 差分GNSS(DGNSS/RTK)部分
- 原理:通過基準(zhǔn)站與移動站(接收機(jī))同時觀測衛(wèi)星,利用載波相位差分技術(shù)消除公共誤差,實(shí)現(xiàn)厘米級甚至毫米級實(shí)時定位。
- 關(guān)鍵指標(biāo):收斂時間、固定率、抗多徑能力、支持頻點(diǎn)(如GPS L1/L2,BDS B1/B2,GLONASS L1/L2等)。
2.2 MEMS慣性導(dǎo)航部分
- 原理:MEMS IMU通過測量比力和角速率,經(jīng)積分運(yùn)算得到位置、速度和姿態(tài)的變化。其特點(diǎn)是體積小、成本低、動態(tài)響應(yīng)快,但精度隨時間漂移。
- 關(guān)鍵指標(biāo):陀螺儀零偏穩(wěn)定性、加速度計零偏、噪聲密度、帶寬。
2.3 傳感器融合算法
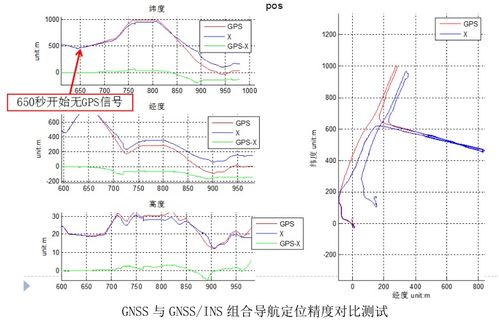
- 核心:通常采用卡爾曼濾波(如擴(kuò)展卡爾曼濾波EKF)或更先進(jìn)的算法,對GNSS位置/速度與IMU的原始數(shù)據(jù)進(jìn)行實(shí)時最優(yōu)估計。當(dāng)GNSS信號良好時,用它校正IMU誤差;當(dāng)GNSS信號丟失時,利用IMU進(jìn)行高精度短時航位推算,實(shí)現(xiàn)無縫定位。
- 關(guān)鍵能力:GNSS信號中斷后的持續(xù)高精度定位時長(通常可達(dá)數(shù)十秒至數(shù)分鐘,取決于IMU等級)。
3. 主要優(yōu)勢與應(yīng)用場景
優(yōu)勢:
- 高可靠性:在信號遮擋環(huán)境下保持連續(xù)定位。
- 高動態(tài)性能:適用于高速、高機(jī)動載體。
- 豐富輸出:提供位置、速度、姿態(tài)(橫滾、俯仰、航向)全參數(shù)。
- 數(shù)據(jù)平滑:輸出頻率高(可達(dá)100Hz以上),軌跡平滑。
典型應(yīng)用場景:
- 無人機(jī)與機(jī)器人:精準(zhǔn)自主飛行、導(dǎo)航、農(nóng)業(yè)植保、物流配送。
- 智能駕駛與高精地圖采集:車道級定位、眾包地圖更新。
- 工程機(jī)械控制:挖掘機(jī)、推土機(jī)、攤鋪機(jī)的自動引導(dǎo)。
- 精準(zhǔn)農(nóng)業(yè):自動駕駛拖拉機(jī)、變量施肥。
- 形變監(jiān)測:橋梁、大壩、邊坡的實(shí)時高精度位移監(jiān)測。
- 移動測繪:車載、船載、機(jī)載激光雷達(dá)或攝影測量系統(tǒng)的POS系統(tǒng)。
4. 技術(shù)選型與咨詢要點(diǎn)
在選擇帶慣導(dǎo)MEMS差分接收機(jī)時,需綜合考慮以下因素:
- 精度需求:
- GNSS RTK精度:水平/垂直精度(如1 cm + 1 ppm)。
- 組合導(dǎo)航精度:GNSS信號中斷期間的位置漂移率(如0.1% of distance traveled)。
- 姿態(tài)精度:航向角精度(如0.1°)與橫滾/俯仰精度。
- 性能與環(huán)境適應(yīng)性:
- IMU等級:消費(fèi)級、戰(zhàn)術(shù)級還是工業(yè)級?直接影響價格和慣性維持性能。
- 初始化與收斂時間:冷啟動、溫啟動、熱啟動所需時間。
- 抗干擾與堅固性:IP防護(hù)等級、工作溫度范圍、抗振動沖擊能力。
- 系統(tǒng)集成與接口:
- 物理接口:CAN、UART、以太網(wǎng)、PPS等。
- 數(shù)據(jù)協(xié)議:支持NMEA-0183、RTCM 3.x、自定義二進(jìn)制協(xié)議等。
- 開發(fā)支持:是否提供SDK、API、數(shù)據(jù)后處理軟件。
- 服務(wù)與支持:
- 差分?jǐn)?shù)據(jù)源:是否需要自建基準(zhǔn)站,或可使用網(wǎng)絡(luò)RTK服務(wù)(如CORS)。
- 售后與技術(shù)支持:固件更新、技術(shù)文檔、定制化服務(wù)能力。
5. 市場主要廠商與趨勢
- 國際廠商:Trimble、NovAtel(Hexagon)、SBG Systems、Septentrio等提供高性能產(chǎn)品。
- 國內(nèi)廠商:北斗星通、華測導(dǎo)航、司南導(dǎo)航、星網(wǎng)宇達(dá)等也推出了具有競爭力的組合導(dǎo)航產(chǎn)品。
技術(shù)趨勢:
- 深耦合集成:GNSS接收機(jī)與IMU在硬件和算法層面更深度融合,提升抗干擾能力。
- 多源融合:結(jié)合視覺、激光雷達(dá)、里程計等多傳感器,構(gòu)成更魯棒的導(dǎo)航系統(tǒng)。
- AI算法應(yīng)用:利用機(jī)器學(xué)習(xí)優(yōu)化濾波算法和誤差建模。
- 芯片化與低成本化:面向大規(guī)模自動駕駛和物聯(lián)網(wǎng)應(yīng)用。
###
帶慣導(dǎo)MEMS差分接收機(jī)是實(shí)現(xiàn)高精度、高可靠性定位的關(guān)鍵設(shè)備,其選型需緊密結(jié)合具體應(yīng)用場景的性能需求、環(huán)境挑戰(zhàn)和成本預(yù)算。建議在采購前,盡可能獲取樣品進(jìn)行實(shí)地測試,尤其是在最苛刻的應(yīng)用環(huán)境下驗(yàn)證其標(biāo)稱性能,以確保系統(tǒng)最終滿足項(xiàng)目要求。對于復(fù)雜應(yīng)用,咨詢原廠或資深集成商進(jìn)行方案設(shè)計往往是成功的關(guān)鍵一步。